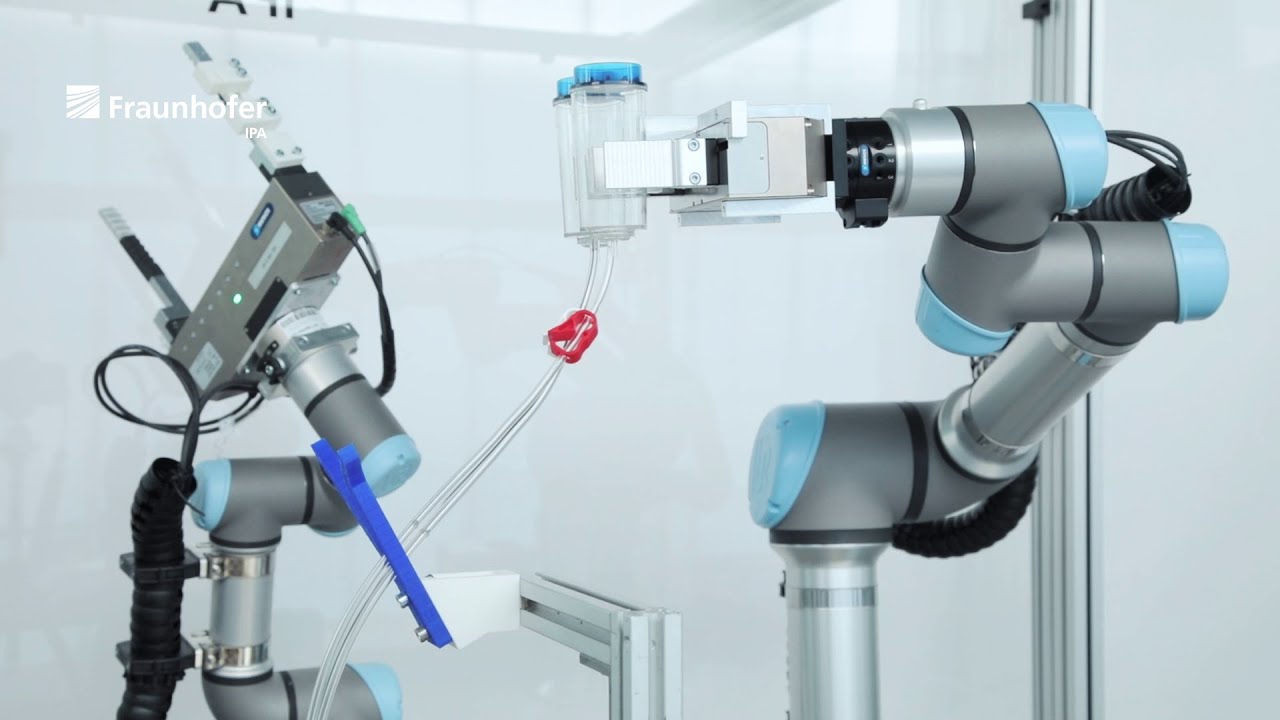
The video shows the sophisticated robot application ”Automatic control cabinet cabling”, which Fraunhofer IPA implemented together with the company Rittal. The IPA software ”pitasc” is used for force-controlled assembly processes. Two UR robot arms carry out the task together. The modular pitasc system enables the robot arms to move and rotate in parallel. They work hand in hand, with one robot holding the cable and the second bringing it to the starting position for the cabling. The robots can find, tighten, hold ready, lay, plug in, fix, move freely or immerse cables. They can also perform push-ins and pull tests.
In general, “pitasc“ is used to program force-controlled assembly tasks in a structured and modular manner. Prefabricated, reusable program modules help to implement an application faster than before. “Pitasc“ helps to re-parameterize the program for a new variant. Using force-torque sensors on the robot, “pitasc“ records the process forces and thus enables force-controlled search and joining strategies. The compensation of component and position tolerances ensures the distribution of forces even with sensitive components.
 Fraunhofer Institute for Manufacturing Engineering and Automation IPA
Fraunhofer Institute for Manufacturing Engineering and Automation IPA